Acoustically-enhanced smart watch for water safety tracking and recovery
Worldwide drowning is the third leading cause of unintentional injury death with around 360,000 annual drownings. 91% of the deaths occur in low-to-middle income countries, with young children at much higher risk. There were 249 cases of death due to drowning in the Australian waterways in the one-year period from 1 July 2017 to 30 June 2018 alone. Close to 60% of the deaths occurred during recreational activities such as swimming, fishing, boating and other water-based activities. This alarming situation significantly affects society and families.
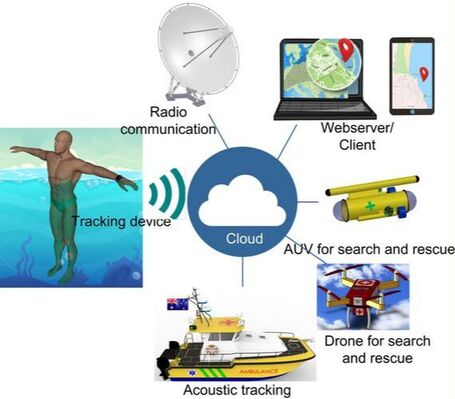
Funded by “Smile Like Drake Foundation” (SLDF) and in collaboration with Road and Maritime Services (NSW) and Australian Federal Police (AFP) This project aims to stop such tragic incidents by proposing an automated tracking system which will provide automatic and manual activation of distress signalling, and allow location both above and underwater. This device will provide a great improvement in search and rescue capability and timeliness.
Sensitive and Flexible Polymeric Strain Sensor for Accurate Human Motion Monitoring
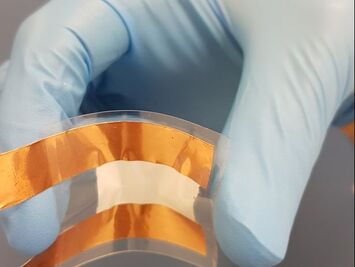
Flexible electronic devices offer the capability to integrate and adapt with human body. These devices are mountable on surfaces with various shapes, which allow us to attach them to clothes or directly onto the body. This paper suggests a facile fabrication strategy via electrospinning to develop a stretchable, and sensitive poly (vinylidene fluoride) nanofibrous strain sensor for human motion monitoring. A complete characterization on the single PVDF nano fiber has been performed. The charge generated by PVDF electrospun strain sensor changes was employed as a parameter to control the finger motion of the robotic arm. As a proof of concept, we developed a smart glove with five sensors integrated into it to detect the fingers motion and transfer it to a robotic hand. Our results shows that the proposed strain sensors are able to detect tiny motion of fingers and successfully run the robotic hand.
|
|
Sensing for Control of URVs
Underwater robotic vehicles (URVs) need to employ a number of sensors that interact with the environment in order to measure various physical quantities (measurands) and to transfer the acquired information to the central processing system that processes the information and uses it to make decisions. URVs are space-constrained with low internal volume, energy-limited, and need to maintain neutral buoyancy. Given this stringent situation, the sensors developed must be small-sized with low foot-print, light in weight, robust, low-powered, surface-mountable while maintaining the streamlined body of the robot.
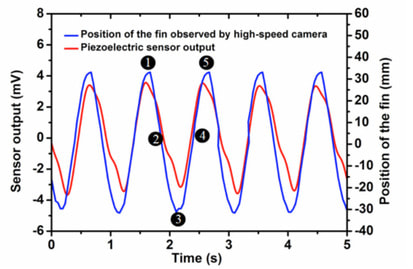
We developed two types of Microelectromechanical systems (MEMS) sensors that benefit the situational awareness and control of a robotic stingray by measuring various key control parameters responsible for the stingray locomotion. The first one is piezoresistive Liquid crystal polymer (LCP) flow sensor which are deployed to determine the steady velocity of propagation of the stingray. The second one is piezoelectric (PZT) micro diaphragm pressure sensors which are developed to measure the low-frequency oscillatory pressure stimuli generated by the stingray fins. Performances of the proposed PZT microdiaphragm sensors at very low frequencies (2 Hz and 1 Hz) are evaluated by performing digital holographic microscopy. The piezoelectric sensors demonstrate an excellent performance in tracking the trajectory of the fins of the stingray. These sensors also give information on the direction of propagation of the stingray and provide essential feedback on the fin flapping frequencies and amplitudes.